Sampling Graph Signals

- Representing a graph signal with few measurements
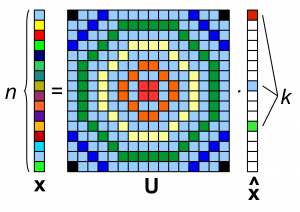
- Regularity/Low-dimensionality priors enable reconstruction (e.g. sparse support in a transform domain)
- Locality of the sampling operation is important
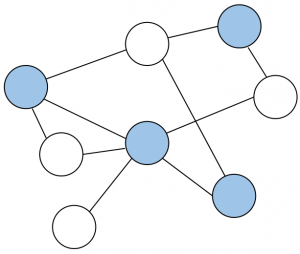
- Pointwise sampling: observing the signal value at certain nodes
- Aggregation sampling: observing an aggregate of the signal values over a neighborhood
Randomized Local Aggregations
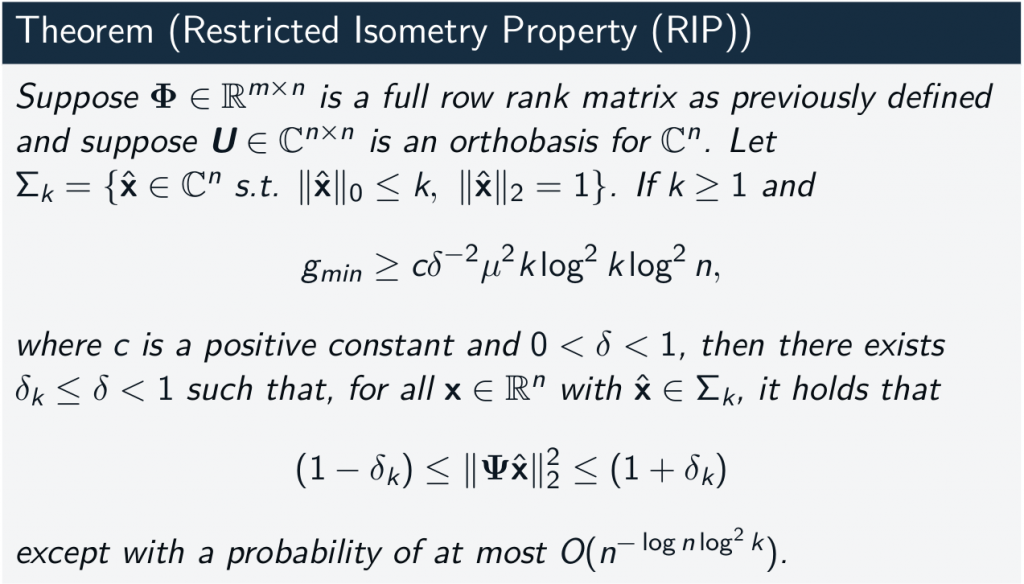
We know from Compressed Sensing that random projections can be used to acquire a compressed representation of a signal. Measurements acquired using Gaussian random projections enable reconstruction of signals sparse in an orthonormal basis. Reconstruction guarantees are provable if the sampling matrix satisfies the Restricted Isometry Property (RIP).
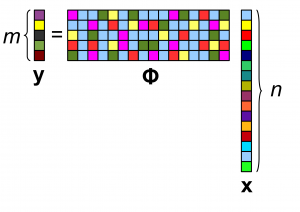
Issue: this sampling method is not localized if there is an underlying graph. It would require global communications throughout the graph.
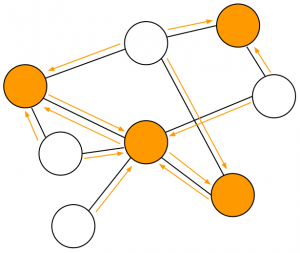
Solution: randomized local aggregations.
- Define a sampling set R
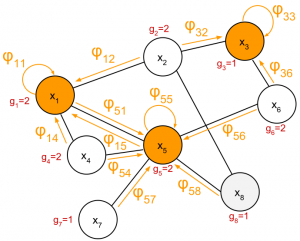
- Aggregate the signal values in each neighborhood taking a linear combination with random weights
- This is equivalent to having a sparse random sampling matrix with the same sparsity pattern as the adjacency matrix of the graph
![]()
How to choose the sampling set? A sufficient condition…
- Choose R to be a superset of a dominating set of the graph
- If the dominating set is larger than the desired number of measurements: use multi-hop aggregations instead of a single-hop
- If the dominating set is smaller than the desired number of measurements:
- either draw a new set of random coefficients to compute a new measurement for some nodes of the domination set
- or select some more nodes not previously chosen
Results
- RIP ensures reconstruction with unknown support and stability to noise (provided enough measurements)
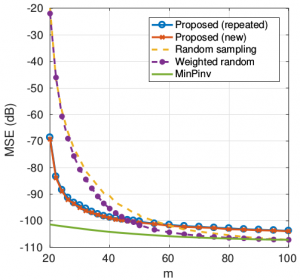
- Good performance without complex optimization of the node sampling set as in some pointwise sampling algorithms. Reconstruction with known signal support with noise:
- It can also deal with unknown signal support:
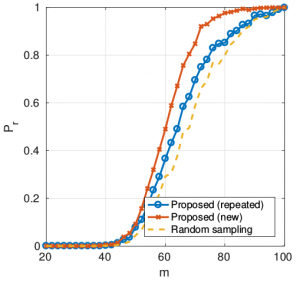
Probability of perfect reconstruction as function of number of measurements. Sensor graph (n=100, k=20). Bandlimited signal.